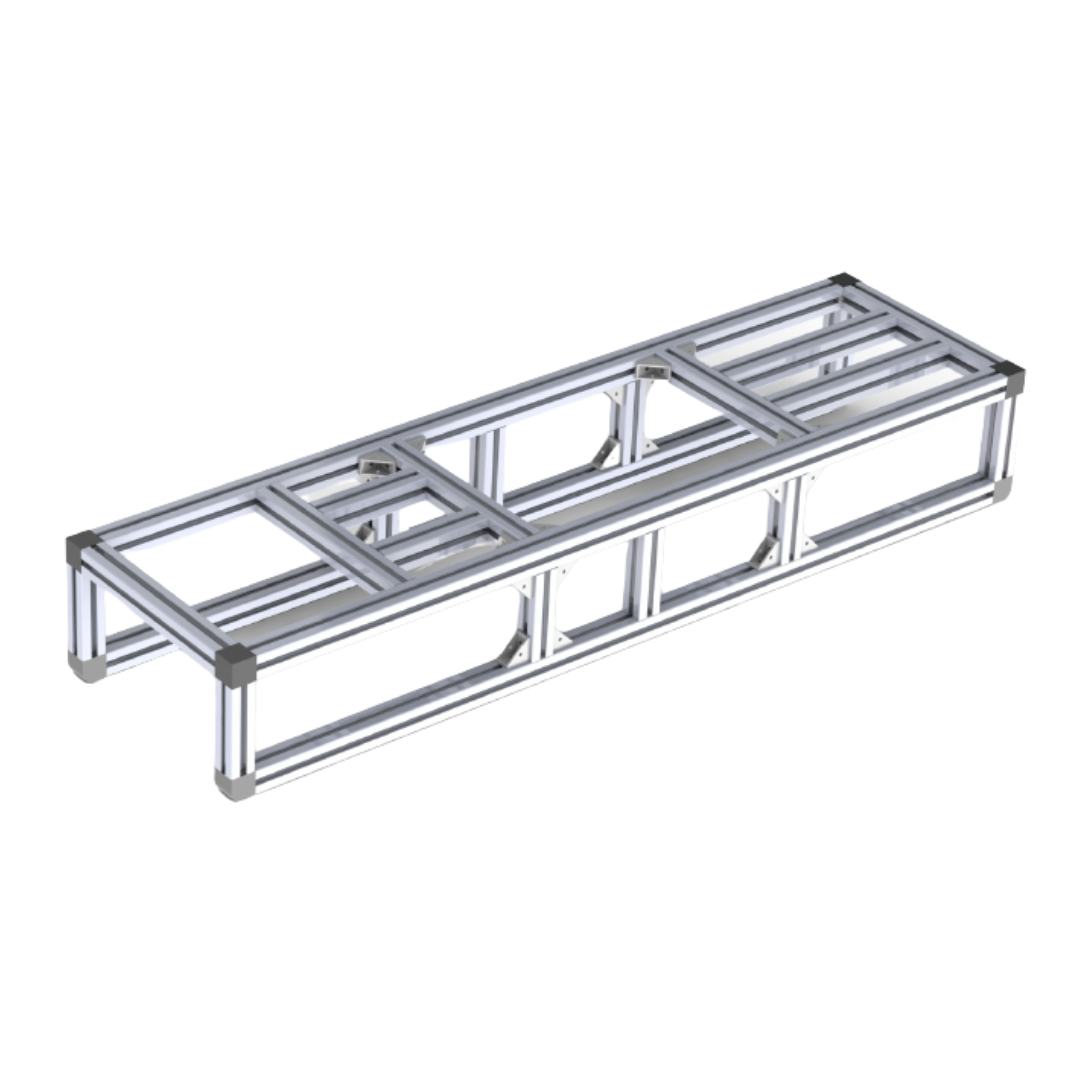
STATIC STRUCTURES
Design chassis of the pod
Oversee integration of all mechanical and electrical subsystem components
Design and manufacture an aerodynamic, carbon fiber shell for the pod
Conduct finite element analysis on the pod to assess structural integrity
PROPULSION
Design, test, and implement a three-phase linear induction motor (LIM) powered propulsion system
Simulate electromagnetic behavior in COMSOL Multiphysics
Collaborate with manufacturers to cut and bond metal laminations for an LIM stator core
BRAKING
Design a pneumatically actuated friction braking system
Decelerate from the maximum speed with a satisfactory braking distance exceeding a safety factor of 2
Utilize a failsafe design to successfully operate even in the event of power loss or pneumatic failure
PNEUMATICS
Design a pneumatics system that safely delivers pressurized air to the actuators of the friction braking system
Protect components from overpressurization with relief valves and pressure sensors
Implement closed-loop pressure control through an electronic pressure regulator
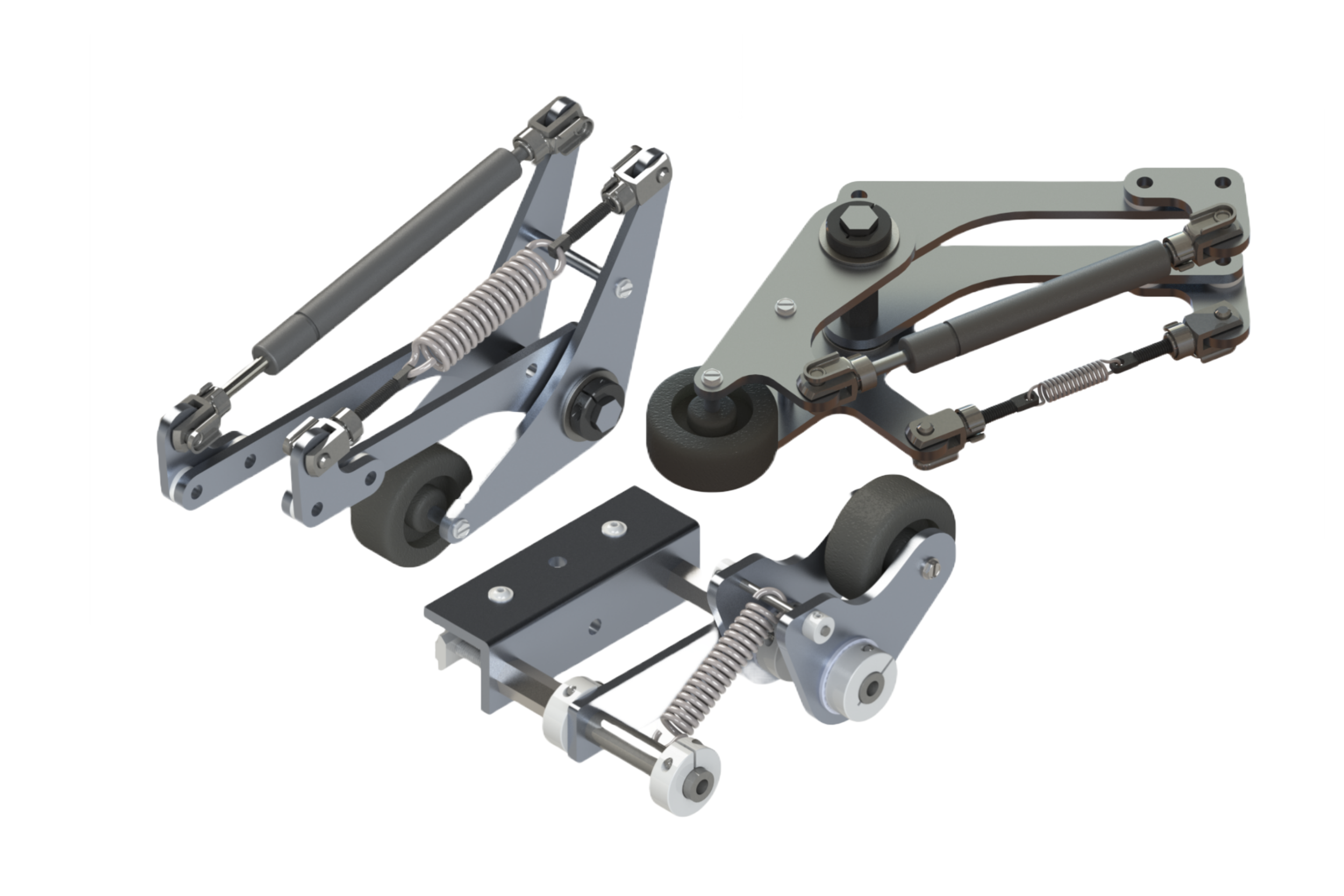
DYNAMICS
Design suspension structures to ensure stability during high-speed runs
Create a Simulink model that characterizes the vibrational response behavior of the pod
Conduct finite element analysis to ensure structural stability when faced with impulse responses
POWER SYSTEMS
Create a high-voltage power system with an inverter capable of supplying a variable-frequency three-phase alternating current to the LIM
Develop a low voltage system to power a microcontroller (MCU), sensors, and actuators
Design a printed circuit board (PCB) that interfaces between the microcontroller and peripherals
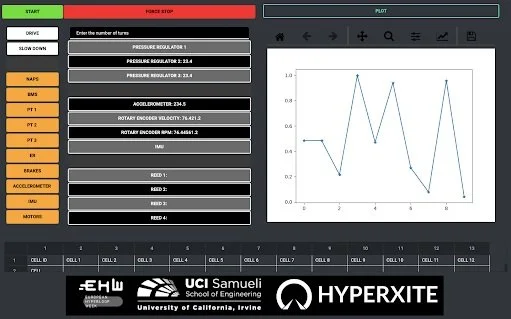
CONTROL SYSTEMS
Develop a graphical user interface (GUI) that interfaces with the MCU (microcontroller) to display data and send commands to the pod
Develop software to operate a finite state machine on an embedded system with the ability to process user events from a remote host computer